
Target Arm Inc
Robotics Engineer (R & D)
At Target Arm Inc., I spearheaded the research and development of innovative robotic systems, including a high-speed drone launch and recovery solution and a multi-drone deployment platform. My work focused on designing and implementing advanced control algorithms, precision calibration systems, and perception technologies, transforming concepts into production-grade solutions for seamless integration of robotics and UAVs.

RALAR -Launch & Recovery Robotics System
Designed and developed from scratch a groundbreaking high-speed, multi-drone launch and recovery system, utilizing a robotic arm to enable high cycle rates, precision, and reliability for rapid deployment and retrieval operations.
Multi-UAV Launch & Recovery Robotic System
One of my most impactful projects was the creation of a multi-drone launch and recovery robotic system, enabling simultaneous deployment of multiple UAVs for rapid and streamlined operations. Beyond engineering, I led the complete software development lifecycle, transforming innovative ideas into commercial-grade robotics solutions tailored to real-world demands.


To meet the high-performance requirements of these systems, I developed production-grade real-time control software in C++ and Rust on Linux, utilizing advanced multi-threaded and asynchronous programming techniques to ensure optimal performance and reliability. These experiences are the result of my passion for innovation and my commitment to delivering robotics solutions that shape the future of UAV technology.
I specialized in bridging the gap between hardware and software by seamlessly integrating low-level firmware on microcontrollers with high-level control algorithms on microprocessors. This integration enabled real-time motion planning and decision-making for robotic arms, driven by sensor feedback for precise and dynamic operations. Additionally, I engineered APIs for sensor integration, fostering smooth real-time interaction between user interfaces and robotic hardware while creating a cohesive communication pipeline between physical systems and simulation environments. This work ensured a unified, efficient, and highly responsive robotics ecosystem.

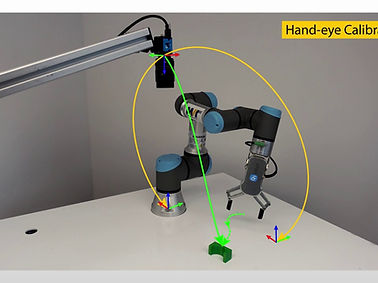
Hand-Eye-Calibration
I performed hand-eye calibration for robotic arms, working with both eye-on-base and eye-in-hand configurations to improve precision and adaptability. This calibration was integrated into a front-end HMI, enabling intuitive control and real-time feedback for operators.
CCTag
I implemented CCTag on drone blades to enable precise positioning and tracking, even under conditions of partial occlusion. This involved developing and testing algorithms to ensure reliable marker detection despite the challenging dynamics of moving blades.

Motion Planning

I have hands-on experience in motion planning for robotic systems using the MoveIt API with both Python and C++. My work involved setting up and achieving precise joint goals and pose goals to ensure accurate positioning and orientation of robotic arms. Additionally, I implemented Cartesian path planning to generate smooth and efficient trajectories for complex tasks, ensuring seamless motion and reliability in dynamic environments.
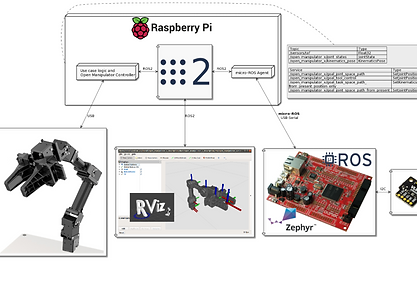
ROS - IOT
I have experience integrating robotic systems on various edge devices, including Raspberry Pi, Orange Pi, Arduino Mega, and Jetson Nano. This involved optimizing software and hardware interactions to ensure efficient performance on resource-constrained platforms. By leveraging the capabilities of these devices, I enabled real-time processing and control for robotics applications, making the systems portable, scalable, and reliable for deployment in diverse environments.
Drone Development

I specialize in building drones from scratch, leveraging components like Electronic Speed Controllers (ESCs) and PX4/Cube Orange flight controllers. From hardware assembly to writing software, I ensure seamless integration for precise control and efficient performance. My expertise spans designing, programming, and optimizing drones for various applications, showcasing a deep understanding of UAV systems and autonomous technologies.