top of page
Maxinsights

Engineered a scalable ROS2-based robotics software stack by integrating Gello, tailored for bimanual robotic arm coordination and control.
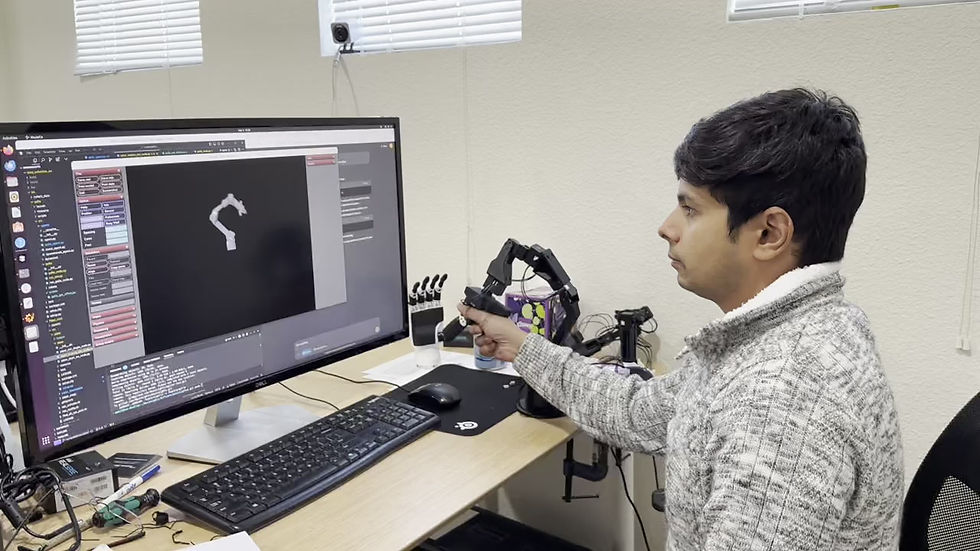
Implemented VR-based control interface for bimanual robotic arms to enable intuitive teleoperation and data collection.

Developed a hardware-in-the-loop (HIL) simulation framework using MuJoCo for real-time robotic system testing and validation
Developed control software for a dexterous robotic hand, enabling precise and versatile manipulation capabilities.


bottom of page